Abstract
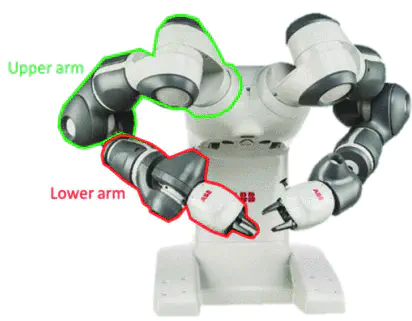
Human-robot collaboration is a key aspect in the development of smart factories in the context of Industry 4.0. Contrary to traditional industrial manipulators operating in structured environments, physical human-robot contact situations may occur for collaborative manipulators. In collaborative operation modes, efficiency can be improved if both operators and robots know mutual intentions. In this context, we tackle the problem of classifying human-robot contact situations based on time series of joint load torque signals. Contact situations are classified into intended interactions and accidental collisions. Furthermore, coarse localization is performed to infer whether a contact occurred on the upper or lower arm of the robot. Accurate and prompt contact classification is essential to implement appropriate reaction strategies. Different feature extraction methods and machine learning classification algorithms are studied aiming at high classification accuracy and reliable generalization to contact situations that were not experienced during the training phase. Experimental evaluation is performed on an ABB YuMi. The proposed method is trained with a small size training dataset which can be collected in less than 7 minutes for each operator, satisfying the requirement of short commissioning times in industrial environments.
Giovanni Cioffi
PhD Student
I am a PhD student in Computer Vision and Robotics. My research focuses on perception for autonomous systems.