Abstract
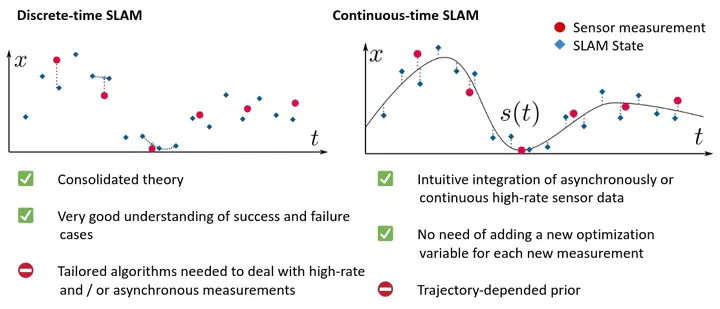
Robotic practitioners generally approach the vision-based SLAM problem through discrete-time formulations. This has the advantage of a consolidated theory and very good understanding of success and failure cases. However, discrete-time SLAM needs tailored algorithms and simplifying assumptions when high-rate and/or asynchronous measurements, coming from different sensors, are present in the estimation process. Conversely, continuous-time SLAM, often overlooked by practitioners, does not suffer from these limitations. Indeed, it allows integrating new sensor data asynchronously without adding a new optimization variable for each new measurement. In this way, the integration of asynchronous or continuous high-rate streams of sensor data does not require tailored and highly-engineered algorithms, enabling the fusion of multiple sensor modalities in an intuitive fashion. On the down side, continuous time introduces a prior that could worsen the trajectory estimates in some unfavorable situations. In this work, we aim at systematically comparing the advantages and limitations of the two formulations in vision-based SLAM. To do so, we perform an extensive experimental analysis, varying robot type, speed of motion, and sensor modalities. Our experimental analysis suggests that, independently of the trajectory type, continuous-time SLAM is superior to its discrete counterpart whenever the sensors are not time-synchronized. In the context of this work, we developed, and open source, a modular and efficient software architecture containing state-of-the-art algorithms to solve the SLAM problem in discrete and continuous time.
Giovanni Cioffi
PhD Student
I am a PhD student in Computer Vision and Robotics. My research focuses on perception for autonomous systems.