Autonomous Quadrotor Flight despite Rotor Failure with Onboard Vision Sensors: Frames vs. Events
Abstract
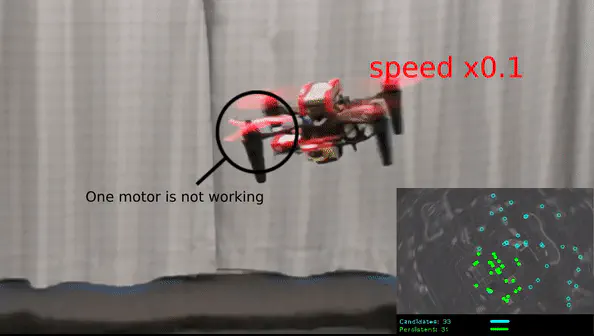
Fault-tolerant control is crucial for safety-critical systems, such as quadrotors. State-of-art flight controllers can stabilize and control a quadrotor even when subjected to the complete loss of a rotor. However, these methods rely on external sensors, such as GPS or motion capture systems, for state estimation. To the best of our knowledge, this has not yet been achieved with only onboard sensors. In this paper, we propose the first algorithm that combines fault-tolerant control and onboard vision-based state estimation to achieve position control of a quadrotor subjected to complete failure of one rotor. Experimental validations show that our approach is able to accurately control the position of a quadrotor during a motor failure scenario, without the aid of any external sensors. The primary challenge to vision-based state estimation stems from the inevitable high-speed yaw rotation (over 20 rad/s) of the damaged quadrotor, causing motion blur to cameras, which is detrimental to visual inertial odometry (VIO). We compare two types of visual inputs to the vision-based state estimation algorithm, standard frames and events. Experimental results show the advantage of using an event camera especially in low light environments due to its inherent high dynamic range and high temporal resolution. We believe that our approach will render autonomous quadrotors safer in both GPS denied or degraded environments. We release both our controller and VIO algorithm open source.
Giovanni Cioffi
PhD Student
I am a PhD student in Computer Vision and Robotics. My research focuses on perception for autonomous systems.